
Furtivue : a furtive view over your messages. (www.furtivue.com)
Furtivue is a web service that allows you to send temporary (self-destructing) emails, as in, you can control how long the message is going to stay with the recipient.
When they open your Furtivue message, it appears for a specified number of seconds, then self-destroys. The duration will depends upon the length of the message (Or you can choose how long you want the message to be displayed)....
Read more

A common start ups question in the gaming industry is : Which graphical environment should we use ? As time is money, a crucial factor in a choice is time: not only the time it takes to build complete games with each API but also a fluid timing during the gaming experience to make it enjoyable. In this analysis, we compare the OpenGL industry standard to the Microsoft XNA game framework on the speed factor. The study includes learning curve, programming, modeling and rendering speeds on both sides....
Read more
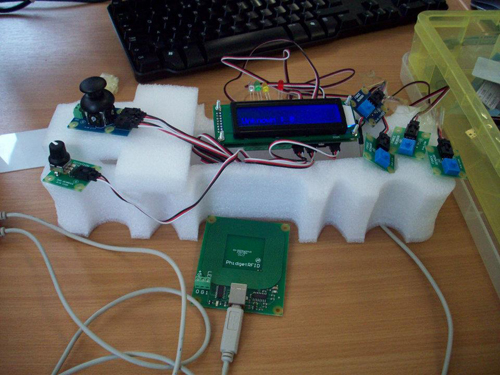
Phidgets are a set of "plug and play" building blocks, some low-cost electronic components that you can control from your personal computer via USB. They provide you with some extra input/output methods beyond the classic mouse + keyboard + screen.
As Harold Thimbleby mentioned in his book Press On, phidgets are a very nice way to get into hardware programming, as you may want to build real systems, not on screen or web browser simulations : phidgets are so-called because they are the physical equivalent of on-screen widgets (Windows Gadgets).
Phidgets = Physical + Widgets
(Widgets = Windows + Gadgets)
Where to find them ?...
Read more